

クライミングムーブ全18種類|非力でも登れる物理法則と基本・応用図鑑
「腕力だけで登ることに限界を感じていませんか?」「『もっと足を使って』と言われるけれど、具体的にどう動けばいいか分からない…」
壁の傾斜がきつくなると落ちてしまうのは、決して筋力が足りないからではありません。自身の体重(質量中心)を効率的に運ぶための「物理法則」を活用できていないことが最大の要因です。
そこで本記事では、感覚的なコツにとどまらず、バイオメカニクス(生体力学)の観点からムーブの原理を徹底分析しました。基本の足技から現代的なニュースクール系まで、全18種類の技術を「物理図鑑」として体系的に解説します。
この記事を読めば、各ムーブの理屈が腑に落ち、最小限のエネルギーで登るための「身体操作システム」をインストールできます。
結論、クライミング攻略の鍵は筋トレよりも物理理解です。重力を味方につけ、4級の壁を論理的に突破しましょう。
非力な人がスルスル登れる物理的な理由とクライミングムーブの役割
筋力に自信のないクライマーが、腕力自慢の人を差し置いて難課題をクリアする光景は珍しくありません。なぜなら、クライミングの本質は筋力コンテストではなく、重力や摩擦といった物理法則を応用して解くパズルだからです。
本セクションでは、多くの初心者が直面する「4級の壁」の正体を物理的な視点で解き明かし、ムーブという技術が果たす役割について解説します。
- 4級で停滞する根本的な原因と打開策
- 懸垂能力と登攀(とうはん)能力の相関関係
- ムーブ習得によるエネルギー効率の最大化
4級の壁の正体|筋力の限界ではなく物理法則の無視
ボルダリングにおいて「4級」というグレードは、多くのクライマーが初めて直面する明確な選別ラインです。この壁を越えられない最大の原因は、単純な筋力不足ではなく、重力や摩擦といった物理法則を無視した登り方を続けていることにあります。5級までは、ホールドを握りしめて腕力で体を引き上げる「懸垂運動」の延長でクリア可能です。しかし4級以上の課題は、壁の傾斜がきつくなったり、ホールドの向きが悪くなったりすることで、人体構造的に腕の力だけでは対抗できない物理的な負荷がかかるよう設計されています。
エンジニアリングの視点で捉えると、これは「出力不足」ではなく「システムのエラー」です。どれほど高性能なエンジン(筋肉)を積んでいても、タイヤ(足)に動力が伝わらず空転していれば、車は坂道を登りません。実際にジムを見渡すと、懸垂が1回もできない女性クライマーが、懸垂10回以上のパワー自慢の男性よりも高いグレードを軽々と完登する光景があります。彼女たちは筋力で重力に逆らうのではなく、骨格を利用して負荷を分散させ、てこの原理を応用して最小限のエネルギーで体を上昇させています。
つまり、あなたが今感じている限界は、肉体のポテンシャル不足ではありません。壁から剥がそうとする重力のベクトルに対して、真正面から筋力のみで対抗しようとする戦略ミスが起きている状態です。この段階で必要なのは、ジムでの筋トレを追加することではなく、重力を味方につけるための物理的なロジックをインストールすることです。次章より解説する技術体系は、そのエラーを解消するための具体的なパッチファイルとなります。
懸垂ができても登れない人への提言
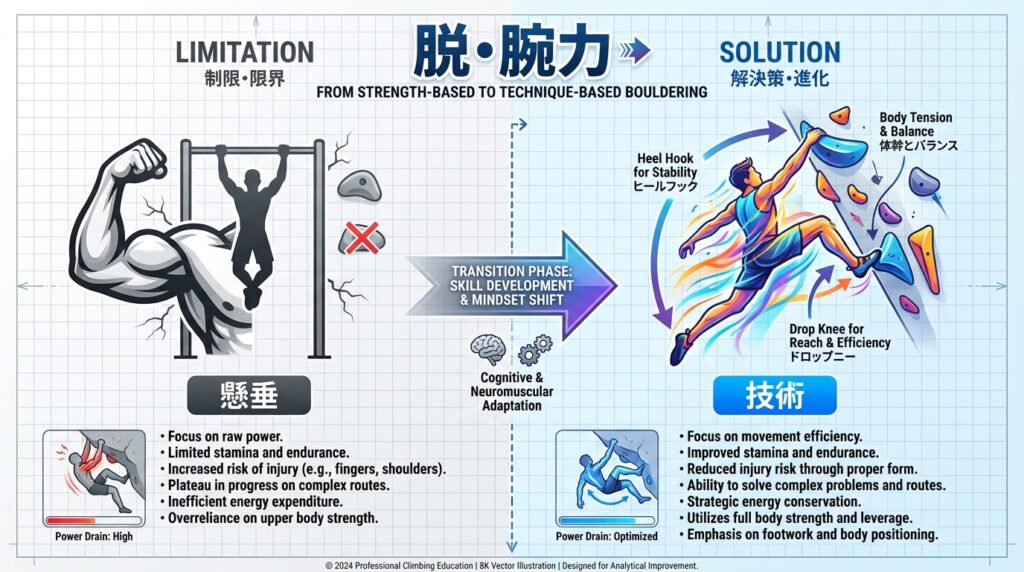
多くの男性クライマーが直面するパラドックスとして、懸垂は何回もできるのに、グレードが上がると太刀打ちできなくなる現象があります。結論から言えば、今のあなたに必要なのは広背筋の強化ではなく、保持している力を推進力へ変換する「効率化」です。
なぜなら、懸垂はあくまで重力に逆らって身体を垂直に引き上げる単純な筋収縮運動に過ぎないからです。対して実際のクライミングは、前後左右への重心移動や、壁からの反力を利用する複雑なベクトル制御が求められます。単一方向への出力が大きくても、それを壁の中に留まる力として正しく作用させられなければ、身体は簡単に剥がれ落ちてしまいます。
ジムを見渡せば、懸垂が一回もできない女性や子供が、腕力自慢の大人よりも高難度の課題をスルスルと登る姿を目にするはずです。彼らは筋力がない代わりに、骨格で身体を支え、足の踏み込みを指先の保持力へと無駄なく伝達する技術に長けています。これこそが、筋力値と登攀能力が比例しない決定的な証拠と言えるでしょう。
これ以上、筋トレルームにこもって懸垂の回数を増やすことに時間を費やすのは得策ではありません。まずは「引く力」に頼るのを止め、自分の身体という重りをいかに楽に運ぶかという、物理的なムーブの習得に意識を切り替えてください。
効率的な移動システムをインストールする重要性

クライミングにおけるムーブの習得とは、単に技の数を増やすことではありません。それは、身体というハードウェアを制御するための「高効率な移動アルゴリズム」を脳内にインストールする作業です。
なぜなら、4級以上の課題は筋力だけで解決できないよう、意図的に設計されているからです。我流の登りは、いわばバグを含んだ非効率なプログラムのようなもので、登るたびに無駄なCPU(体力)とメモリ(精神力)を浪費します。一方で、洗練されたムーブを身につければ、最小限の出力で重力に逆らうことが可能になります。
たとえば、ハシゴを登る動作を想像してください。手で体を引き上げるよりも、足で体を押し上げるほうが圧倒的に楽なはずです。これと同じ理屈で、ムーブとは「いかに腕を使わずに高度を稼ぐか」を体系化した物理的な解法パターンに他なりません。上級者が重力を感じさせずに登れるのは、筋力が桁外れだからではなく、この効率化システムが最適化されているからです。
まずは「力で登る」という古いOSをアンインストールしましょう。そして、物理法則に基づいた新しい移動システムを書き込むことで、あなたのクライミングは劇的に進化します。次の章から、その具体的なコードとなる「バイオメカニクス」について解説します。
脱・腕力のためのバイオメカニクスとクライミングムーブ理論
ここからは、個別のテクニックを学ぶ前にインストールすべき「OS(オペレーティングシステム)」にあたる基礎理論を解説します。
前章でお伝えした通り、クライミングは筋力だけで攻略するように設計されていません。まずは物理学と解剖学に基づいた身体操作の原則を理解し、なぜその動きが必要なのかというロジックを腹落ちさせることが重要です。
ここでは、脱・腕力を実現するための4つの核心的理論について解説します。
- 重力を味方につける重心と支持基底面の関係
- 移動のためにあえてバランスを崩す三点支持の応用
- 筋力を温存するためのエネルギーコスト管理
- 骨格構造を利用した身体操作の言語化
この理論を理解することで、後に続く各ムーブの習得効率が飛躍的に向上します。
重力と戦わない物理法則|COM【質量中心】とBOS【支持基底面】
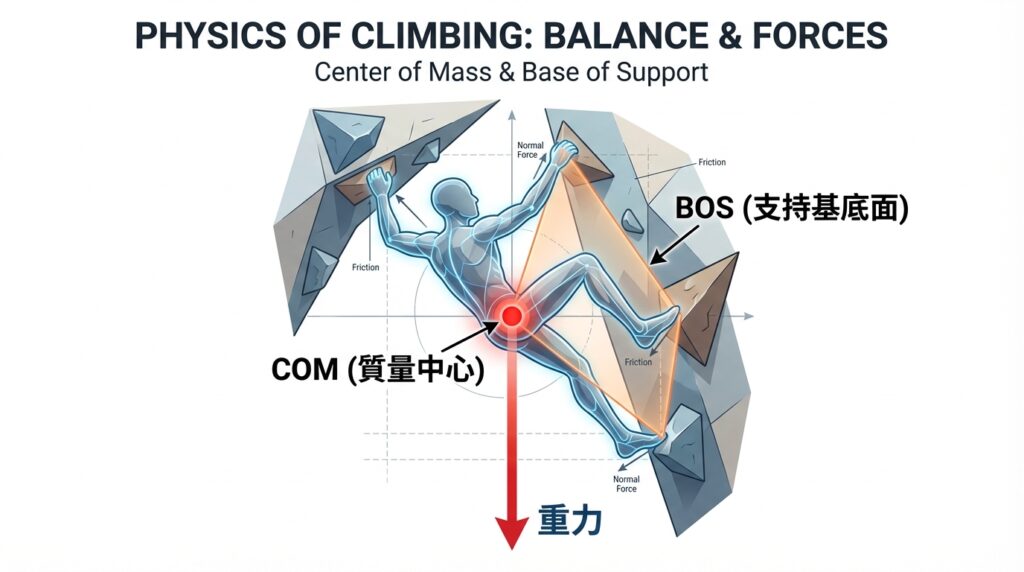
クライミングにおける身体操作の本質は、COM(Center of Mass:質量中心)とBOS(Base of Support:支持基底面)という2つの物理変数の制御に集約されます。
なぜなら、物体が静止しているか、移動しているかは、この2つの位置関係によって物理的に決定されるからです。COMとは、人体の質量が釣り合う中心点、いわゆる「重心」を指し、一般的に骨盤の内側、おへそのやや下あたりに位置します。対してBOSとは、壁やホールドに接している手足の点を結んでできる多角形の面積、つまり「体を支えている土台」のことです。
多くの初心者が陥る「動けない」という現象は、無意識のうちにCOMをBOSの垂直線上に留め続けようとする本能的な防衛反応が原因です。物理学において、COMがBOSの内側に収まっている状態は「安定」を意味します。しかし、クライミングにおいて「登る」という行為は、現在地からより高い位置への「移動」であり、移動を開始するためには、あえてこの安定状態を崩さなければなりません。
例えば、歩行動作を思い浮かべてみてください。直立している状態から一歩踏み出す際、人は無意識に重心を前方へ傾け、倒れそうになる力を利用して足を前に運びます。クライミングも同様で、次のホールドを取るためには、意図的にCOMをBOSの外側へ「投げ出す」勇気が必要です。支持基底面から重心が外れた瞬間に発生する回転モーメントや重力の落下エネルギーを、次のホールドへの推進力として転換するのです。
壁にへばりついて動けなくなる人は、常に安定を求めてCOMをBOSの中に閉じ込めようとしています。これでは、重力に逆らって静止し続けるために無駄な筋力を浪費するだけです。逆に上級者は、重力が体を倒そうとする力を利用し、あたかも倒立振子のように最小限の力で身体を運びます。重力とは戦って打ち勝つものではなく、進行方向へのベクトルを生み出すためのエネルギー源として活用すべきです。
三点支持の真実と誤解|安定ではなく移動のために崩す技術

登山やクライミングの講習で最初に教わる「三点支持」という概念は、実はスムーズな移動を妨げる最大の足かせになり得ます。
なぜなら、三点支持はあくまで身体を壁に固定し、滑落を防ぐための「静止の技術」だからです。物理的に見れば、物体が移動するためには均衡状態を崩し、重心を進行方向へ投げ出すエネルギーが必要になります。常に三点を維持しようとする登り方は、車のブレーキを踏んだままアクセルをふかすようなもので、非常に燃費の悪い運動と言わざるを得ません。
私たちが普段行っている「歩行」という動作を思い出してください。歩くとき、人は必ず片足立ち(一点支持)になる瞬間を経て、不安定を利用しながら重心を前に進めています。クライミングも同様で、上級者が流れるように登れるのは、安定した三点支持に固執せず、対角線上の手足を軸とした「二点支持」の瞬間を恐れずに作り出しているからです。
もちろん、高所での作業やレスト(休憩)の場面において、三点支持が安全確保の鉄則であることに変わりはありません。しかし、4級以上の課題を攻略する段階においては、「安定させるために三点を保つ」思考から、「移動するためにあえてバランスを崩す」思考へのパラダイムシフトが求められます。
次のホールドを取りに行く際、身体が不安定になることを過度に恐れてはいけません。むしろ、その不安定さが生み出す運動エネルギーを推進力に変えることこそが、脱力したまま壁を登るための極意と言えるでしょう。
エネルギーコストの概念|静的ムーブと動的ムーブの燃費比較
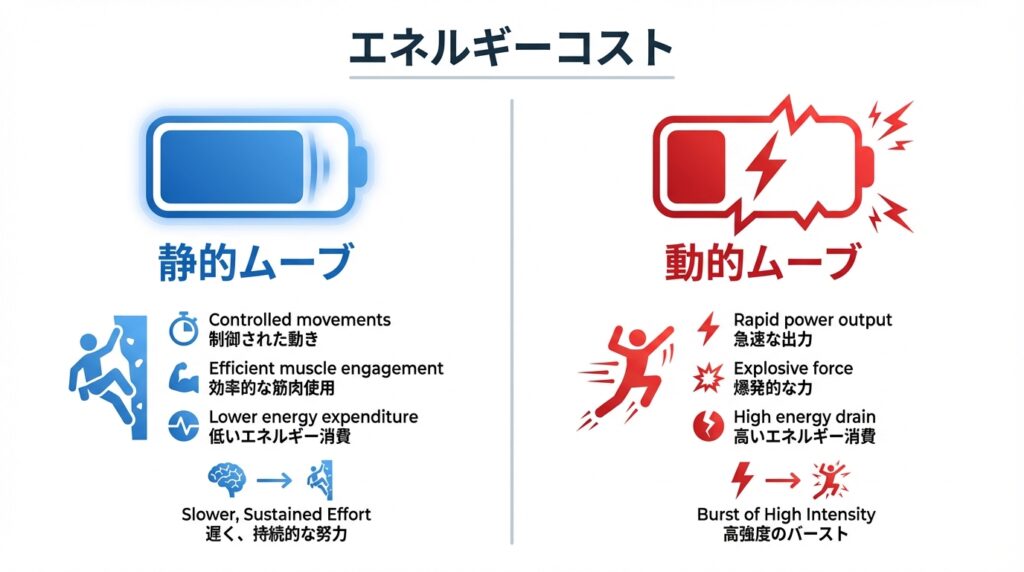
壁の傾斜が強くなるほど、ゆっくりと動く静的ムーブよりも、勢いを利用した動的ムーブの方がエネルギー効率は高くなります。一見すると、丁寧にバランスを取る静的な動きの方が安全で省エネに見えますが、物理的なエネルギーコストの観点からは逆の現象が起こるからです。
筋肉が力を発揮し続けている時間、すなわち「タイム・アンダー・テンション(TUT)」が長くなるほど、血管が圧迫されて血流が阻害されます。結果として筋肉への酸素供給が絶たれ、疲労物質である乳酸が急激に蓄積してしまうでしょう。静的ムーブでカブリ(強傾斜)に耐えながら次のホールドを探る行為は、常に最大出力でエンジンを空ふかししている状態と同じです。
スポーツ科学の研究においても、傾斜壁における登攀では、ダイナミックな動作の方が総エネルギー消費量が有意に低いというデータが示されています。一瞬の爆発的な出力で身体を引き上げる動的ムーブは、ホールドを保持している絶対時間が短いため、トータルでの筋力消耗を最小限に抑えられるからです。
丁寧な登りを心がけるあまり、壁に張り付いている時間が長すぎて腕がパンプ(前腕の筋肉が張って動かなくなる現象)してしまうのが、初心者が陥る典型的なパターンと言えます。恐怖心を抑えて素早く動く勇気を持つことが、実は最も確実なエネルギー保存則に適った戦略です。
身体操作の言語化|クロスボディ連動と骨で登る感覚
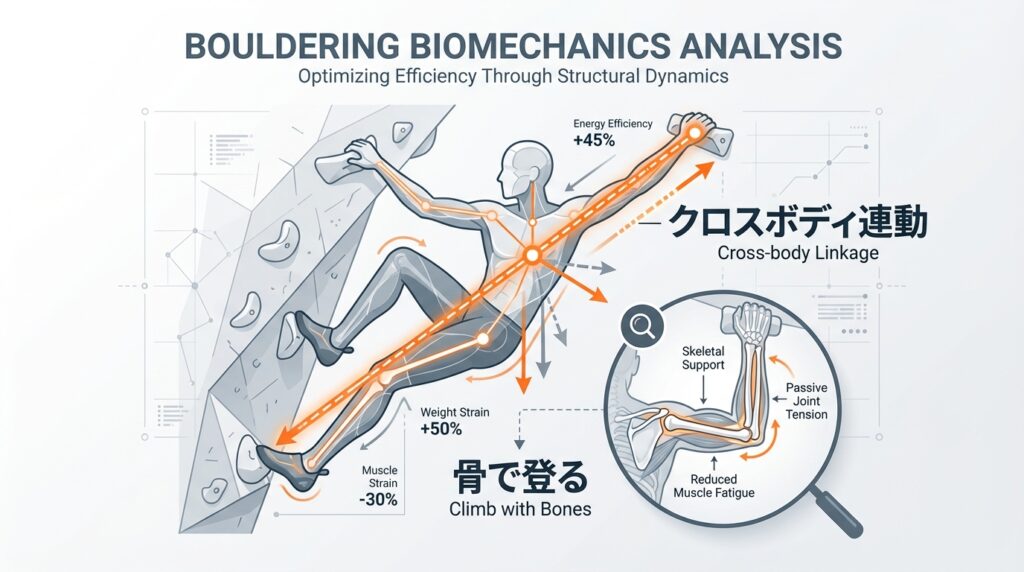
効率的な身体操作の核心は、「対角線の連動(クロスボディ)」と「骨格による支持」の2点に集約されます。腕力に頼らず登るためには、まず人間の運動連鎖が、右手と左足のように対角線上で繋がっている事実を理解しなくてはなりません。
歩行時に自然と手が振られるように、クライミングでも右手を出したい時は左足で踏み切るのがバイオメカニクスの基本です。この対角線の繋がりを意識し、体幹を「雑巾を絞る」ようなイメージで捻じると、背面の大きな筋肉が連動してバネのような推進力が生まれます。壁を正面から力任せに登るのではなく、回旋運動を使ってスルスルと上がる感覚です。
また、「筋肉ではなく骨で登る」という意識改革も欠かせません。常に肘を曲げて身体を引き寄せている状態は、筋肉が常に収縮しているため、すぐに前腕がパンプ(乳酸が溜まり硬直すること)してしまいます。鉄棒にぶら下がる時のように、あえて肘や肩の関節を伸ばしきり、骨格というフレーム構造に体重を預けてみてください。
筋肉を使うのは、次のホールドへ移動する一瞬だけで十分です。基本姿勢では脱力して骨で支え、動く時だけ対角線のバネを使う。このオンとオフの切り替えこそが、上級者が涼しい顔で壁を登り続けられる物理的な種明かしと言えるでしょう。まずは腕の力を抜き、骨格で体重を感じることから始めてください。
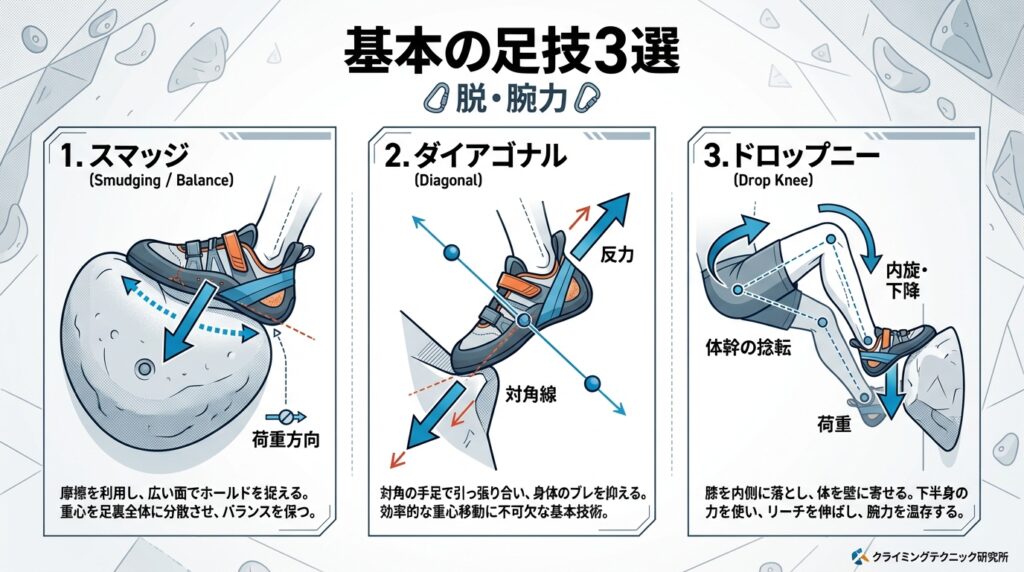
すべての土台となる基本のクライミングムーブ足技3選
バイオメカニクスの観点から「骨で支える」感覚を理解しても、それを実践するための強固な土台がなければ意味がありません。上半身の脱力を実現できるかどうかは、下半身の安定性、すなわち足の置き方ひとつで決まると言っても過言ではないでしょう。
本セクションでは、クライミングシューズの機能を最大限に引き出し、物理的に理にかなったフットワークについて解説します。
- 親指側のエッジを使った回転軸の確保
- 小指側のエッジを使った身体の引き寄せ
- ホールドがない壁面での摩擦利用
これらは全ての応用技術の基礎となります。無意識に繰り出せるようになるまで、反復練習してください。
インサイドエッジ|親指球への加重とピボットの起点

インサイドエッジは、クライミングにおけるフットワークの原点であり、全ムーブの9割で使用すると言っても過言ではない最重要スキルです。具体的には、シューズの親指側先端(インサイド)のみをホールドに乗せ、親指の付け根である「母指球」一点に全体重を預ける立ち方を指します。
なぜこれほど重要かというと、母指球を回転軸(ピボット)として機能させるためではないでしょうか。足の裏全体をベタッと置いてしまうと、足首の関節がロックされ、膝の向きを自由に変えることができません。インサイドエッジで「点」として立つことで初めて、コンパスの針のように足先を軸にして膝を左右に倒し、スムーズな重心移動が可能になります。
実践する際は、ホールドの形状をよく観察し、一番乗せやすい凸部に親指のエッジを垂直に食い込ませましょう。踵(かかと)はホールドの高さよりも少し上げた状態をキープするのがコツです。この体勢を維持することで、次のホールドを取りに行く際に、アキレス腱のバネを使って壁を蹴る出力が増大するでしょう。
初心者が陥りやすいミスとして、恐怖心から接触面積を増やそうとして土踏まず付近まで深く乗せてしまうケースが見受けられます。しかし、これは物理的に見ても逆効果と言わざるを得ません。接地面積が増えるほど摩擦圧は分散し、何より足首の自由が奪われて次の動作へ移行できなくなるからです。まずは低い位置にあるホールドで、親指一本で立ち、膝を左右に振るドリルを繰り返してピボットの感覚を養ってください。
アウトサイドエッジ|小指と薬指側面での掻き込み

アウトサイドエッジとは、クライミングシューズの小指側(外側)の縁を使用してホールドに立ちこむフットワーク技術です。この動きの物理的な役割は、単に足場を確保することだけではありません。身体を壁に対して横向きにする「側対(そくたい)」の姿勢を作り出し、重心(COM)を壁の奥深くへと押し込むための重要なスイッチとして機能します。
実践における具体的な手順は以下の通りです。
- ホールドに対し、小指から薬指の付け根付近のエッジ(角)を正確に当てます。
- 足首を90度に固定したまま、膝を内側へと倒し込んでください。
- 単に体重を乗せるだけでなく、足の側面を使ってホールドを手前に引き寄せる「掻き込み」の動作を加えます。
初心者が陥りやすいミスとして、ソールのエッジではなくシューズのアッパー(足の甲を覆う布や革の部分)をホールドに押し付けてしまうケースが散見されます。これでは十分な摩擦係数が得られず滑落の原因となるため、必ずランド(側面のゴム)のエッジ部分が接触しているかを目視で確認しましょう。
また、過去に足首の捻挫経験がある場合、小指側に体重を乗せることに恐怖を感じるかもしれません。しかし、クライミングシューズは高い剛性で作られているため、足首をしっかりとロックして体重を預ければ、骨格構造により安定します。この技術は、後に解説する「ダイアゴナル」を成立させるための絶対条件となるため、足でホールドを掴む感覚を養ってください。
スメアリング|摩擦係数の最大化と垂直抗力を意識した踏み込み

スメアリングは、明確なフットホールド(足場)が存在しない壁面に対し、クライミングシューズの摩擦力(フリクション)だけを頼りに立つ技術です。突起にエッジを引っ掛けるこれまでの足技とは異なり、ゴムのグリップ性能と物理法則を最大限に利用して身体を支えます。
このムーブを成立させる鍵は、物理学における「摩擦力=摩擦係数×垂直抗力」という公式の理解にあります。シューズの性能(摩擦係数)が一定であれば、滑らないために必要な要素は、壁に対して垂直方向にかける力(垂直抗力)の最大化です。壁の面に対して、垂直に体重を押し付ける力が強ければ強いほど、足は固定されます。
具体的な手順を見ていきましょう。まず、親指の付け根である母指球付近を壁面にセットし、シューズのソール(靴底)をできるだけ広く密着させます。この際、かかとは上げすぎず下げすぎず、アキレス腱に適度な緊張感が残る位置で固定してください。足首を柔軟に使い、ゴムを壁の微細な凹凸に食い込ませるイメージで圧力をかけ続けます。
初心者が陥りやすい失敗は、滑ることへの恐怖心から腰が引け、壁から身体が離れてしまう姿勢です。腰が引けると、足への荷重ベクトルが壁と平行方向(下向き)に働き、垂直抗力が著しく減少してしまいます。皮肉なことに、怖がってへっぴり腰になるほど摩擦力は失われ、実際にスリップして落ちてしまうでしょう。
感覚的なコツとして、壁を蹴るのではなく、床に落ちたガムを踏んでさらになすりつけるような、粘りのある動作を意識してください。勇気を持って腰を壁に近づけ、重心を真上から乗せていく行為こそが、物理的に最も安全で滑らない状態を作り出します。壁を信じ、垂直抗力を味方につける意識変革が必要です。
重心制御による省エネ技術|静的クライミングムーブ7選

足裏の摩擦を最大限に活かす基本技術を習得した次は、全身を使った重心制御へとステップアップします。
ここでは、物理的なバランスを保ちながら最小限の力で壁を登る「静的(スタティック)ムーブ」について解説します。これらは、無駄な筋力消費を抑える省エネ技術の要であり、脱・腕力クライマーへの道筋において不可欠なOS(オペレーティングシステム)と言えるでしょう。
この章では、以下の7つの技術についてメカニズムと実践方法を紐解きます。
- 対角線のバランスを利用する基本姿勢
- 膝の回旋を利用してリーチを伸ばす技術
- 足をカウンターウェイトとして使う2種類のバランス技
- 高低差や狭い局面を打開する応用テクニック
- 遠心力を利用した初速形成の技術
腕力に頼らず、骨格と物理法則を駆使して重力を攻略するための具体的な手法をインストールしましょう。
ダイアゴナル|対角線のバランス維持と回旋連動
ダイアゴナルは、クライミングにおける最も基礎的かつ重要な省エネ技術です。物理的には、身体の対角線上にある手と足を支点として軸を作り、回旋運動を利用して次のホールドを取りに行く動作を指します。正面を向いて登る「正対」では腕の屈筋群に頼りがちですが、この技術を使えば背中の大きな筋肉や骨格構造で体重を支えることが可能です。
実践の手順として、まず右手でホールドを掴んでいる場合、対角にあたる左足のインサイドエッジをホールドに乗せましょう。次に、余った右足をバランスを取るためのカウンターウェイトとして流し、身体を壁に対して斜めにひねってください。この姿勢を作ると支持基底面の中に重心が収まりやすくなり、腕の力を抜いても壁から剥がれ落ちることはありません。
初心者が陥りやすいミスは、右手で掴んで右足に乗る「同手同足」の状態になり、身体がドアのように開いてしまう現象です。いわゆる「バーンドア」と呼ばれるこの不安定な状態は、回転モーメントを制御できていない証拠と言えるでしょう。常に「右手なら左足」「左手なら右足」という対角のセットを意識し、意図的にバランスの軸を構築します。
感覚的には、濡れた雑巾を絞るように体幹をねじり、その反発力を利用してリーチを伸ばすイメージが有効です。身体をひねることで肩の位置が上がり、正対の状態よりも数センチ遠くのホールドに手が届くようになります。腕力という有限なリソースを守るため、この回旋連動を無意識レベルで実行できるよう身体にインストールしてください。
ドロップニー【キョン】|内旋動作と半月板リスクの管理
ドロップニーは、国内のクライミングジムでは「キョン」という通称で広く知られる、中級者へのステップアップに不可欠な足技です。このムーブの物理的な本質は、片足の膝を内側下方向に深く折りたたむ「股関節の内旋」動作にあります。両足を壁の間で突っ張り棒のように機能させ、下半身を強固にロックするシステムと考えてください。
膝を落とすことで骨盤が壁に対して垂直に近い角度まで引き寄せられ、回旋の力が生まれます。その結果、壁側の肩が前へ押し出され、正対して登る場合と比較してリーチ(到達距離)が劇的に伸びるでしょう。腕力で体を引き上げるのではなく、下半身のねじれを上半身の推進力に変換する高度なエネルギー活用術です。
具体的な手順は以下の3ステップで構成されます。
- ホールドにつま先を乗せ、親指の付け根でしっかりと踏み込みます。
- つま先を軸にして、かかとを外側へ回しながら膝を地面方向へ落としてください。
- 腰をひねり、壁と身体の隙間に骨盤をねじ込むように重心を移動させます。
この時、身体全体で「雑巾を絞る」ような感覚を持つとうまくいきます。足の親指から膝、腰、そして対角線の手へと力が螺旋状に伝わるイメージを持ってください。もし腰が壁から離れていると感じるなら、それは膝の折りたたみ角度が浅く、十分なロックがかかっていない証拠と言えます。
しかし、この強力なムーブには医学的な注意点が伴います。整形外科的な観点から見ると、ドロップニーは膝の「内側半月板」に強い回転トルク(ねじれの負荷)をかける動作です。足首や股関節の柔軟性が低い状態で無理に膝だけを回そうとすると、関節構造が耐えきれず損傷するリスクが高まります。
怪我を防ぐためには、膝単体ではなく股関節の根元から回す意識を持つことが重要です。また、膝に違和感や痛みを感じた場合は直ちに使用を中止し、フィジカル面での可動域拡大を優先しましょう。諸刃の剣であることを理解し、自身の身体と対話しながら習得すべき技術です。
アウトサイドフラッギング|重心維持のためのカウンターウェイト
アウトサイドフラッギングは、ホールドに乗せていない自由な足(遊脚)を、軸足の外側から背中側へと流すことでバランスを取る技術です。このムーブの物理的な役割は、建設機械のクレーンなどが用いる「カウンターウェイト(釣り合い重り)」と全く同じ原理に基づいています。
ホールド配置の都合上、右手と右足のように身体の同じ側で身体を支えなければならない場面では、物理的に回転モーメントが発生します。そのままでは「ドアが開く」ように身体が回転し、壁から剥がれ落ちてしまうでしょう。そこで、遊脚を軸足のさらに外側へ大きく伸ばし、重心(COM)の位置を調整することで、この回転力を相殺します。
具体的な実践手順は以下の通りです。まず、ホールドに乗っている軸足に体重を乗せ切り、片足立ちの状態を作ります。次に、空いているもう片方の足を、軸足の後ろ(背中側)を通して反対方向へ深く差し込んでください。この時、流した足のつま先や側面を壁に軽く当てて支点を作ると、より強固な安定感が得られます。
初心者が陥りやすいミスは、足を流す位置が浅く、カウンターウェイトとしての効果が十分に発揮されていないケースです。バランスが取れないと感じる場合は、思い切って足を遠くへ伸ばし、腰を壁に近づける意識を持ってください。身体の側面を壁に押し付ける「側対(サイド)」のフォームを作ることで、腕に頼らずとも静止できるポイントが見つかります。
このムーブは、足場が一つしかない場合や、次のホールドを取りに行く際にダイアゴナルの姿勢が作れない局面で重宝します。筋力で耐えるのではなく、自重を重りとして利用し、物理的に安定するポジションを探る感覚を養いましょう。
インサイドフラッギング|狭いスペースでの足の差し込み
インサイドフラッギングは、ホールドに乗っている支持足と壁の間にできるわずかな隙間へ、もう一方の足を交差させて差し込むバランス技術です。アウトサイドフラッギングが足を身体の外側へ大きく振ってバランスを取るのに対し、こちらは自身の内側を通して重心(COM)を制御します。一見すると窮屈で不自然な体勢に映りますが、障害物が多い壁面や狭いスペースにおいて、物理的に安定を得るための極めて合理的な手段と言えます。
このムーブを採用する主な理由は、アウトサイドフラッギングを行うための空間的余裕がない、あるいは身体の開きを強力に抑え込みたいという力学的な要請があるからです。例えば、コーナーの角や巨大なホールド(ボテ)が側面にあり、足を外へ広げられない状況を想像してください。このとき、軸足の膝裏を通すように反対足を深く差し込むことで、カウンターウェイトの効果を発生させ、壁から剥がそうとする回転モーメントを相殺します。
具体的な手順としては、まずホールドに乗っている軸足の膝を曲げて壁との距離を空け、足を通すためのトンネルを確保してください。次に、遊んでいる足をその隙間へ素早く滑り込ませ、つま先や足の側面を壁に強く押し当てます。この一連の動作により、下半身がロックされ、腕力を使わずに次のホールドへ手を伸ばすための土台が完成するでしょう。
よくある失敗は、窮屈な姿勢を嫌がって足の差し込みが浅くなり、バランス制御が不発に終わるケースです。中途半端なクロスでは重心移動が完了せず、逆に動きを制限するだけの足かせになりかねません。太もも同士が密着するほど深くねじ込む感覚を持つことが、狭いルートを攻略する際の重要なポイントとなります。股関節の柔軟性が求められますが、習得すれば壁際での選択肢が格段に広がるはずです。
ハイステップ|高い支持基底面への重心乗り込みと低身長向け攻略
ハイステップは、腰の位置よりも高いホールドに足を上げ、その一点に体重を預けて身体を一気に引き上げる技術です。物理的には、支持基底面(BOS)を高い位置に再設定することで、質量中心(COM)を強制的に上部へ押し上げる動作と定義されます。このムーブは、身長やリーチが不足しているクライマーにとって、物理的な不利を覆すための最も強力な武器となります。
通常の手順では届かない遠くのホールドも、足場を高くすることで相対的な距離を縮められます。腕の引き付け力だけに頼らず、人体で最も強力な大腿四頭筋や大殿筋の出力を利用するため、エネルギー効率の観点からも極めて合理的です。
実践の手順として、まずは柔軟性を活かして目標のホールドへ足を置きます。次に、上げた足のかかとにお尻を近づけるイメージで、重心を大胆に前上方へ移動させてください。このとき、下の足で壁を蹴り出し、すべての体重を上の足一本に乗せ換える「乗り込み」の動作が核心となります。
初心者が陥りやすいミスは、足を上げただけで満足し、重心が後ろに残ってしまうケースです。これでは膝が外側に開き、力が分散して身体が持ち上がりません。勇気を持って壁に胸を近づけ、上げた足の膝を内側へ絞るように力を込めると、垂直方向への推進力が生まれます。
もし股関節が硬くて足が上がらない場合は、勢いをつけて足を振るか、手で足首を持って強引に引き上げる方法も有効でしょう。リーチのなさは言い訳になりません。高い位置に足場を作ることさえできれば、小柄なクライマーでも長身の人と同じ高さまで到達可能です。恐怖心を捨てて、高い足場へ乗り込んでください。
手に足【ハンド・フット・マッチ】|支点を一点に集約する柔軟性活用

手に足、あるいはハンド・フット・マッチと呼ばれるこの技術は、現在手で保持しているホールドに足を乗せる動作を指します。物理的には、上肢で確保していた支点へ下肢のBOS(支持基底面)を移行させ、重心位置を一気に高い位置へリセットする役割を持ちます。次のホールドが極端に遠い場合や、足場がない壁面において、強制的に高度を稼ぐための有効な手段です。
実践の手順は、まず対象のホールドを掴んでいる腕をしっかりと伸ばすことから始まります。壁と身体の間に十分な「懐(ふところ)」と呼ばれる空間がなければ、脚を引き上げるスペースが物理的に存在しないからです。次に、ホールド上の指を少し端に寄せ、足を置くための面積を確保しましょう。最後に、膝を高く引き上げ、空けたスペースへつま先を慎重にねじ込みます。
初心者が陥りがちなミスは、必死になるあまり腕を引きつけ、壁に張り付いてしまうことです。これでは自分の身体が邪魔になり、物理的に足が上がりません。また、足を乗せた瞬間に安心し、重心移動が完了する前に手を離してしまうと、支点が安定せず後方へ落下するリスクが高まります。乗せた足に体重が完全に乗り移るまで、手は添えたままバランスを制御してください。
このムーブは股関節の柔軟性が求められますが、身体が硬い場合でも攻略法はあります。膝を正面ではなく外側に大きく開く「がに股」の状態で引き上げると、骨盤のロックが外れやすくなるでしょう。それでも届かない時は、一瞬の反動を利用して足を放り投げるように乗せる手法も有効です。柔軟性の欠如は、タイミングと軌道の工夫でカバーできます。
サイファー|遠心力で初速を作る静と動のハイブリッド技術
サイファーは、ホールドに乗っていない「遊脚」を振り子のようにスイングさせ、その遠心力と慣性を推進力に変えて次のホールドを取る技術です。静的なバランス維持から動的な移動へと切り替える際、エンジンの点火剤として機能します。
なぜこの動きが有効かというと、静止状態から筋肉の収縮のみで身体を持ち上げるには大きなエネルギーを要しますが、足の振り出しによる運動量を利用すれば、初動の負荷を物理的に相殺できるからです。腕力に頼らずとも、物理法則による「外力」を味方につけることで、壁の中での移動コストを劇的に下げられます。
具体的な手順は以下の通りです。
- 軸足と対角の手で身体を支え、フリーになっている足を脱力させて後方または側方へ振る予備動作を行います。
- ためた力を解放するように、遊脚を目標方向へ大きく振り上げます。
- 身体が浮き上がるタイミングに合わせて軸足を踏み込み、発生した推進力に乗って手を伸ばします。
初心者が陥りやすいミスは、振る足の勢いに身体が振り回され、軸足の意識が抜けてスリップしてしまう現象です。回転軸となる軸足の母指球(親指の付け根)には常に強い圧力をかけ続け、コンパスの針のように一点でバランスを制御してください。
感覚的なコツとして、重たい荷物を遠くへ放り投げる際の「反動」をイメージすると良いでしょう。腕で身体を引き上げるのではなく、下半身が生み出した上昇ベクトルに上半身を便乗させる感覚を掴めば、筋力を使わずに驚くほど遠くのホールドへ到達可能です。
ホールドを最大活用する形状別クライミングムーブ3選
ここまでは、足で「立つ」ことで重力に対抗する技術を見てきました。しかし、立体的で複雑な形状をしたホールドや、強傾斜の壁を攻略するには、足をあたかも「第三の手」のように扱う発想の転換が求められます。
このセクションでは、単に体重を支えるだけでなく、ホールドの形状を逆手にとって身体を固定・推進させるための応用技術を解説します。
- かかとを使って身体を引き寄せる技術
- 足の甲を使って身体の回転を抑え込む技術
- 腕の出力ベクトルを「引く」から「押す」へ変換する技術
重力に対するアプローチの選択肢を増やし、登りの次元を一段階引き上げてください。
ヒールフック|ハムストリングスの活用と膝の保護
ヒールフックは、本来「体重を支える(押す)」役割を持つ足を、「身体を引き寄せる(引く)」ための腕のようなデバイスとして機能させる技術です。バイオメカニクス(生体力学)の視点では、下肢をフック状のアンカーとして固定し、強靭なハムストリングス(太もも裏の筋肉群)の収縮力を利用して、COM(質量中心)を壁側へ牽引する動作と定義されます。腕の屈筋群よりもはるかに太い足の筋肉を動員できるため、前腕の消耗を劇的に抑えることが可能です。
具体的な実践手順は以下の3ステップで構成されます。
- アンカリング: かかとの骨、踵骨(しょうこつ)周辺をホールドの角や突起に深く引っかけます。アキレス腱に近い柔らかい部分ではなく、硬いヒールカップ全体を押し当てるイメージを持ってください。
- ロック: つま先をやや外側へ開き、膝の角度を固定します。これにより股関節が外旋し、かかとがホールドに食い込む力が強化されます。
- 牽引(プル): 膝を曲げる動作を強く意識し、ハムストリングスを収縮させて身体をホールド方向へ引き上げます。
初心者が陥る典型的な失敗は、かかとを乗せただけで満足してしまう「置物状態」です。ヒールフックは静置するものではなく、能動的に力を発揮するムーブです。かかとを支点にして、膝裏でボールを潰すような感覚で力を込め続けなければ、十分な摩擦力も推進力も生まれません。ホールドにかかるベクトルが「下」ではなく「手前(自分側)」に向いているか、常に確認しましょう。
【Dr.チェック】高負荷による故障リスクと回避策
強力な武器である反面、ヒールフックは諸刃の剣です。特に頭に近い高さに足をかける「ハイヒール」や、膝を過度に外側へ捻る体勢は、ハムストリングスの肉離れや膝の外側側副靭帯(LCL)損傷を招くリスクが統計的に高いとされています。膝に「パキッ」という違和感や鋭い痛みが走った場合は、即座にムーブを解除してください。事前のストレッチはもちろん、自身の柔軟性を超えた角度での強引な入力は避け、可動域の範囲内で運用することが重要です。
トウフック|前脛骨筋による引き上げと剥がれ防止
トウフックは、足の甲(アッパー部分)をホールドの裏側や側面に引っ掛け、身体が壁から剥がれ落ちるのを防ぐカウンターバランス技術です。特に傾斜の強い壁や、天井のようなルーフ課題において、手だけで支えきれない体重を分散させるための「第3の手」として威力を発揮するでしょう。
このムーブを成立させる物理的な鍵は、スネの前側にある「前脛骨筋(ぜんけいこつきん)」の強い収縮にあります。単に足を添えるだけでは摩擦が足りず、負荷がかかった瞬間にすっぽ抜けてしまうため、足首を能動的に固定するロック機構が欠かせません。
実践的な手順は以下の通りです。
- 足の甲をホールドの引っかけたい部分へ深く差し込みます。
- つま先を自分のスネに近づけるように力を入れ、足首を90度以下に曲げる「背屈(はいくつ)」の状態を作ってください。
- 足先を支点にし、かかとを床方向へ下げることでテコの原理が働き、強力なロックが完了します。
初心者が陥りやすいミスは、足先だけの力で耐えようとして足首が伸びきってしまうことです。これではフックとしての構造強度が足りません。靴の中で足の指を丸め、ホールドを裏側から「噛みつく」ような強い意識を持つことが成功率を高める要因となります。
また、シューズの性能による影響も無視できません。足の甲に摩擦力を高めるラバーパッチが貼られたモデルは、物理的にグリップ力を底上げしてくれます。もしご自身のシューズにラバーがない場合は、接触面積を稼ぐために通常よりも深く足を差し込む工夫が必要です。
マントリング【返し】|引く動きから押す動きへのベクトル変換

マントリングは、プールの縁に手をかけて陸に上がる動作と同じ原理です。これまで駆使してきた「ホールドを引く力(プル)」を、手のひらを支点として「ホールドを押す力(プッシュ)」へと180度転換させます。物理的には、手よりも下にあった重心(COM)を、手のひらという支持基底面(BOS)の真上に移動させる作業と言えます。これにより、背中や上腕二頭筋の消耗を抑え、普段はクライミングであまり動員されない上腕三頭筋(二の腕の裏側)の出力で身体を持ち上げることが可能になります。
具体的な実行手順は以下の通りです。
- ホールドを胸の位置まで強く引きつけ、同時に片足を同じホールド、または高い位置にあるスタンスに上げます。
- 引きつけた勢いを殺さずに肘を天井へ向けて高く跳ね上げ、手のひらの付け根(パーム)をホールドに強く押し付けて手首を返します。
- 乗り込んだ足と手のひらで三角形を作り、身体全体を上方へ押し切ります。
初心者が失敗する最大の要因は、肘の位置が低いまま無理やり身体を持ち上げようとすることです。肘が手首より下がっている状態では、テコの原理が働かず、体重を支える構造が作れません。まずは「肘を返す」ことに全神経を注いでください。また、足の補助なしに腕だけで返すのは至難の業と言えます。ヒールフックで下半身を壁に固定し、足の力で身体を引き上げながら、その一瞬の無重力感を利用して手首を返す連携が成功の鍵です。
【Dr.チェック】手首への負担とTFCC損傷リスク
このムーブは手首を深く背屈させて全体重を乗せるため、TFCC(三角線維軟骨複合体)や手根管に強烈な圧縮負荷がかかります。手首に違和感がある場合は、テーピングで可動域を制限するか、手のひら全体ではなく指の腹で耐えるなどして負荷を分散させましょう。無理なマントリングは長期間の戦線離脱を招くため、ご自身の関節柔軟性に合わせたフォーム調整が不可欠です。
壁を突破する武器|ダイナミックなクライミングムーブ3選
じっくりと手順を踏んで攻略する静的なムーブや、特定の形状に対応する技術を習得したとしても、どうしても手足の長さ(リーチ)だけでは届かない距離の壁に直面することがあります。ここからは、身体全体をバネのように使い、爆発的な運動エネルギーを生み出して物理的な距離を解決する「ダイナミックムーブ」について解説します。
このセクションでは、壁を突破するための以下の3つの武器を紹介します。
- 重力が拮抗する一瞬の無重力状態を利用してホールドを捉える技術
- 下半身の爆発的伸展により、放物線軌道を描いて遠くへ跳ぶ方法
- 左右対称の出力制御を行い、空中で両手同時にホールドを掴む高等技術
ダイナミックな動きは、単なる力任せの跳躍ではありません。綿密な軌道計算とタイミングの制御によって成立する、極めて論理的な物理現象です。
デッドポイント|死点の活用と恐怖心の克服ドリル
デッドポイントとは、身体の上昇力と重力が拮抗し、空中で一瞬だけ静止する「死点(Deadpoint)」を利用してホールドを捉える技術です。両手両足が壁から離れるランジとは異なり、足はホールドに残したまま、片手だけを瞬発的に伸ばして遠くのホールドを獲得します。このムーブの本質は、飛びつくことではなく「無重力状態を作り出すこと」にあります。
物理学的に見ると、静的に手を伸ばすだけでは届かない距離であっても、下半身の加速を利用することで到達可能範囲を拡張できます。また、身体が最高到達点で静止した瞬間は速度がゼロになるため、指先にかかる衝撃負荷を最小限に抑えられるという利点があります。正確なコントロールと省エネを両立させる、中級者にとっての必須スキルと言えます。
具体的な動作手順は以下の3ステップで構成されます。
- タメを作る: 狙うホールドと逆の手足で身体を支え、息を吐きながら腰を壁に近づけつつ深く落とします。
- 発射: 足でホールドを強く踏み込み、腰を壁に沿わせるように上方へ引き上げます。
- 捕捉: 上昇の勢いが止まる一瞬の「死点」で、力を抜いてターゲットのホールドに手を添えます。
多くの初心者が失敗する原因は、タイミングのズレよりも「壁への恐怖心」です。顔が壁に近づく恐怖から腰が引けてしまうと(へっぴり腰)、重心が壁から離れてしまい、放物線の軌道が崩れて落下します。壁にキスをするくらいのつもりで、上半身を壁に預ける勇気が必要です。
恐怖心を克服するためのドリルとして、まずは低い位置にある持ちやすいホールド(ガバ)を使って、「小さなデッドポイント」を反復してください。ホールドを取ることよりも、空中で一瞬フワッと止まる感覚を脳に焼き付けることが目的です。この無重力感を身体が覚えれば、恐怖心は物理的な確信へと変わり、より遠くのホールドへも冷静に手を伸ばせるようになります。
ランジ【ダイノ】|下半身の爆発的伸展と放物線軌道の制御
ランジ(ダイノ)は、単なるジャンプではありません。物理学的に定義するならば、下半身という強力なエンジンで生み出した運動エネルギーを、正確なベクトルでターゲットとなるホールドへ伝達する「射出運動」です。静的なムーブでは物理的に届かない距離を、放物線を描くことで一気にショートカットするこの技術は、成功すれば劇的な省エネ効果をもたらします。腕力で体を引き上げるのではなく、脚力で質量中心(COM)を打ち上げる感覚をつかんでください。
具体的な実行手順は、エネルギーの蓄積と解放のプロセスに集約されます。
- タメの形成: スタンスに足を乗せた状態で、腕を伸ばしきったまま腰を深く沈めます。この時、筋肉をゴムのように引き伸ばし、弾性エネルギーを蓄えます。
- 爆発的伸展: 沈み込んだ反動を利用し、一気に足を蹴り伸ばします。重要なのは「上」ではなく「壁方向」へ腰を押し込むことです。壁から離れるベクトルが発生すると、ホールドに触れても体が剥がされてしまいます。
- 頂点でのキャッチ: 放物線の頂点、つまり身体が一瞬無重力になる「デッドポイント」でターゲットを捉えます。
初心者が陥りやすい最大のミスは、飛び出す前に腕を曲げて体を引きつけてしまうことです。これでは下半身の力が腕に吸収され、推進力が半減してしまいます。発射の瞬間まで腕はロープのようにリラックスさせ、足の蹴り出しのみで初速を作ることが不可欠です。また、恐怖心から腰が引けてしまうと重心が壁から遠ざかり、ホールドを掴めたとしても強烈な遠心力で落下する原因となります。
【リーチ不足攻略】身長160cm以下のためのBeta
もし規定のスタンスからどうしても距離が届かない場合、スタンスの踏み位置を高く修正するか、中継となる小さな突起(インターミディエイト)を経由する方法があります。また、単発の蹴り出しではなく、一度小さく沈んでから反動をつける「予備動作」を大きくすることで、筋肉の伸張反射を利用し、身長差をカバーする飛距離を生み出すことが可能です。
ダブルダイノ|左右対称の出力と空中姿勢のシンメトリー制御
ダブルダイノは、四肢すべてを壁から離し、空中を飛翔して次のホールドを両手同時にキャッチする最大強度の動的ムーブです。片手で止める通常のランジとは異なり、左右の手足から発揮されるパワーが完全に均衡していなければ成功しません。物理学の視点では、左右どちらかの出力が弱いと身体に回転モーメントが発生し、空中でバランスが崩れて壁から引き剥がされる力が働くためです。
成功へのプロセスは、緻密なシンメトリー制御に基づいた以下の3ステップで構成されます。
- ポテンシャルの蓄積: 腕を伸ばし、膝を深く曲げてバネを最大限に圧縮します。この時、重心(COM)は壁から引き剥がさず、真下へ落とすイメージを持ってください。
- 爆発的な同期: 下半身の強烈な伸展と同時に、両腕で壁を引きつけます。重要なのは、手と足の動きを完全に同期させ、垂直方向への推進ベクトルを最大化することです。
- 空中の姿勢制御: 飛び出した瞬間、腹筋に力を込めて身体を一枚の板のように固めます。視線は両手で掴むべきホールドの一点を見据え続けましょう。
初心者が陥りやすいミスは、恐怖心から無意識に片手を先に出してしまう「時間差キャッチ」と言えます。これでは左右のバランスが崩れ、ホールドに触れられても振られて落下してしまいます。両手が同時に着地する音(「ババン!」ではなく「バン!」)を目指し、左右対称の動作を徹底することが不可欠です。
【Dr.チェック】頸椎と着地衝撃のリスク管理
ダブルダイノは失敗時のリスクが高く、ホールドがすっぽ抜けると背中や後頭部からマットへ落下する危険性があります。着地位置を確認してからトライすることはもちろん、首をすくめると着地時に頸椎へのダメージが増大するため、顎を引いて衝撃に備える姿勢を習慣化してください。また、過度なトライは腰椎への圧縮負荷を招くため、回数を決めて集中することが長期的な故障予防につながります。
現代的な競技スタイル|ニュースクール系クライミングムーブ2選

従来の岩登りを模したスタイルとは一線を画す、屋内競技特有の進化を遂げたのが「ニュースクール」と呼ばれるジャンルです。近年ではボルダリングジムの課題にもパルクールの要素が取り入れられ、単なる保持力だけでは解決できない局面が増えています。
このセクションでは、現代的な課題攻略に必須となる以下の複合テクニックについて解説します。
- ポゴ【Pogo】
- コーディネーション
これらは物理的なバランスに加え、リズム感や空間把握能力が試される高度なスキルといえます。
ポゴ【Pogo】|足の反動を推進力に変える無足場テクニック
ポゴは、足を乗せるスタンスが存在しない、あるいは極端に悪い状況下でも、何もない空間から推進力を生み出す現代的なテクニックです。従来のクライミングが「足場を押す」ことで上昇するのに対し、このムーブは「足を振る反動」そのものをエンジンのように利用します。まさにニュースクール課題を攻略するための必須スキルと言えます。
なぜ足場がない状態で身体が持ち上がるのでしょうか。それは、下半身という大きな質量を持った物体を激しく振ることで発生する「遠心力」と「角運動量」を、上半身の引きつけと同期させて垂直方向のベクトルに変換しているからです。鉄棒で懸垂をする際、足を振ると楽に上がれる現象を、より意図的かつ爆発的に行っているのがこの技術の本質です。
具体的な動作プロセスは、振り子の原理を応用した以下の3段階で構成されます。
- スイングの予備動作:
ホールドにぶら下がった状態で、振る足を大きく後方へ振りかぶり、ポテンシャルエネルギーを溜めてください。 - キックと引きつけの同期:
振りかぶった足を、腹筋を使って勢いよく前方へ蹴り上げます。この足が最下点を通過し、斜め上へ振り上がる瞬間に合わせて腕を引きつけましょう。 - モーメントの利用:
足の重さが身体を引っ張り上げてくれる感覚を掴み、その浮力を利用して次のホールドをキャッチします。
初心者に多い失敗は、足先だけの小さな動きで振ろうとしてしまうケースです。これでは十分な遠心力が得られません。股関節を支点にし、太もも全体をムチのようにしならせて大きく振ることが成功の鍵となります。また、振る方向がズレていると身体が回転してしまうため、行きたいホールドに向けて一直線に足を蹴り出す意識を持ってください。
身長が低く、通常の足位置では次のホールドに手が届かないクライマーにとって、ポゴは強力な解決策となります。スタンスに依存せずに距離を稼げるため、「リーチが足りないから登れない」という物理的なハンデを、運動エネルギーによって覆すことが可能だからです。
コーディネーション|走る・飛ぶ・掴むの複合動作プロセッシング
コーディネーションは、現代のボルダリングシーン、特にコンペティションや「今風」と呼ばれる課題において避けて通れない複合的な運動スキルです。単一のムーブで完結せず、「走る」「飛ぶ」「掴む」といった複数の動作を、途切れることなく一連の流れとして実行する能力を指します。
なぜこの技術が必要かといえば、物理的に初動で得た運動エネルギー(慣性)を保存し、次の動作の動力源として転用し続けなければ到達できない配置になっているからです。従来のクライミングが「静止→移動→静止」の繰り返しであるのに対し、コーディネーションは動きの中で次の体勢を作り出す高度な運動連鎖が求められます。
具体的な実践イメージとして、複数の大きなホールド(ボテ)を駆け抜けてゴールへ飛びつくような課題を想定してください。成功には以下の3段階のプロセスを脳内で並列処理する必要があります。
- リズムの生成: 地上での助走や初動の反動を使い、リズム良くスタンスを駆け上がります。足場を「踏む」のではなく、軽く「弾む」ように通過することがポイントです。
- 空中での演算: 身体が空中に浮いているコンマ数秒の間に、次のホールドの位置と身体の向きを目線でロックし、着地姿勢を空中で作り出します。
- 慣性の制御: ホールドをキャッチした瞬間、残っている勢いを体幹で受け止め、振られを最小限に抑え込みましょう。
失敗する最大の要因は、動作の途中で「確認」や「ためらい」を入れてしまい、流れ(フロー)を断ち切ってしまうことです。一度止まってしまうと慣性が消失し、ゼロから再始動するための莫大な筋力が必要となるため、結果として落下を招きます。
【脳内処理のアップデート】身体よりも脳を鍛える
このムーブの本質は、筋力よりも脳の情報処理速度(プロセッシング)に依存します。身体が動いている最中に視覚情報を処理し、反射的に四肢を動かす神経回路を養うことが、パルクール的な要素を含む現代的課題を攻略する鍵となるでしょう。
点ではなく線で登るためのムーブ連携と実践

個々のムーブを習得しても、実際のルート攻略でつまずくことがあります。それは、ムーブ単体を「点」として捉え、一連の流れである「線」として統合できていないためです。クライミングの本質は、最適化された動作プログラムの連続実行にあります。
このセクションでは、習得した技術を実践で活かすための以下の連携手法について解説します。
- ムーブ間のスムーズな接続技術
- 登る前の詳細なシミュレーション法
- ジム外で感覚を養うトレーニング
スムーズな連携は、無駄な力の消費を抑え、完登率を劇的に向上させます。
ムーブのトランジション|重心を殺さないスムーズな連携
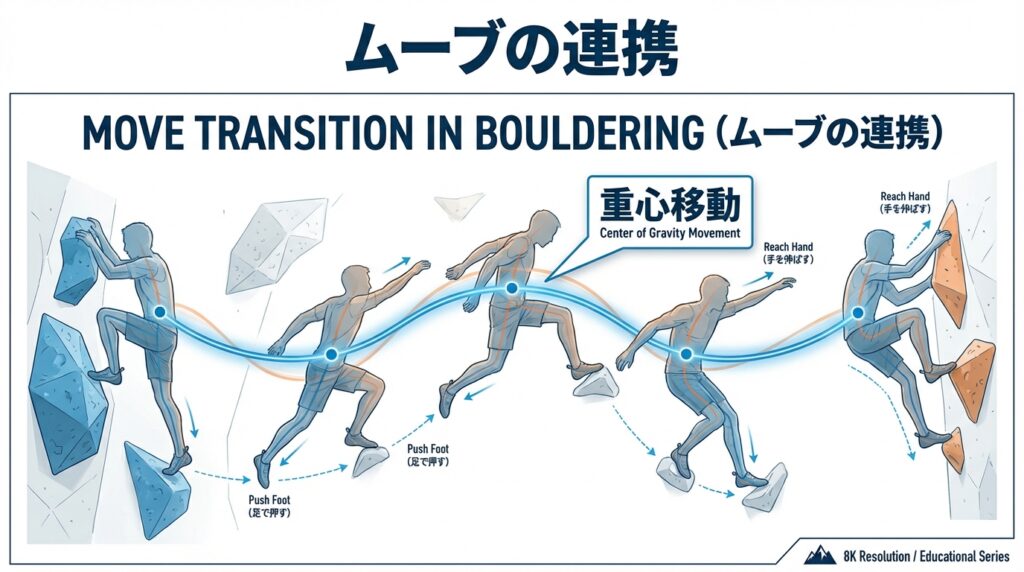
クライミングを「点の集合」ではなく、途切れることのない「線の運動」として再定義する必要があります。個別のムーブがいかに洗練されていても、技と技のつなぎ目で重心が完全に停止してしまえば、完登への道は遠のくばかりです。物理学における慣性の法則が示す通り、静止している物体を動かし始める瞬間にこそ、最大のエネルギーコストがかかるからです。
上手いクライマーは、前のムーブで発生した運動エネルギーの残滓を、次のムーブの初動エネルギーとして効率的に転用しています。右手を伸ばしてホールドを掴んだ際、その勢いを身体の芯で受け止めつつ、反動を利用して流れるように足の入れ替えを行うといった一連の動作です。これをバイオメカニクスの視点では「運動連鎖の保存」と捉え、自転車が巡航速度を維持するのと同じ原理で、最小限の筋出力での移動を可能にします。
逆に、ホールドを取るたびに体勢を整えて完全に静止する「ストップ&ゴー」の繰り返しは、毎回ゼロから加速するための負荷を筋肉に強要します。腕力に自信がない人ほど、一度動き出したらゴールまで重心(COM)を停滞させない意識が不可欠です。平面的な移動ではなく、背骨を軸とした螺旋(スパイラル)の動きでムーブ同士を接着し、一筆書きのような登りを目指してください。
オブザベーション|登る前の脳内シミュレーション手法

オブザベーションとは、単にホールドの位置を目で追うことではありません。スタートからゴールまでのすべての動作シークエンスを、自分の身体感覚と照らし合わせて脳内にプログラミングする高度なシミュレーション作業です。多くの初中級者が壁に取り付いてから「次は右手か、左手か」と迷いますが、これでは重力によって体力が削られ続け、思考と筋肉の両方が酸欠状態に陥ってしまいます。
登攀中に考える時間をゼロにするためには、地上にいる間に思考プロセスを完了させなければなりません。オブザベーションの質を高めるには、単に「手順」を決めるだけでなく、重心の位置や足の運びといった「解像度」を上げることが不可欠です。
具体的には、実際に地上で手足を動かしながら登る動作を真似る「ハンドシミュレーション」を行いましょう。これは傍から見ると奇妙なダンスのように映るかもしれませんが、運動皮質を刺激し、実際のパフォーマンス精度を高める科学的に有効なリハーサルです。「この距離ならデッドポイントが必要だ」「ここで足を入れ替えないと次の手が届かない」といったバグ(不確定要素)を事前に洗い出し、修正案を用意しておくことで、本番での迷いを排除します。
優れたプログラマーがコードを書く前に設計図を完成させるように、クライマーも登る前に脳内で一度完登しておくべきです。壁の前で目を閉じ、ホールドの感触や身体にかかる負荷まで鮮明にイメージできたとき、あなたの身体は無駄な力を使わず、自動操縦のようにゴールへと導かれるでしょう。
自宅でできる感覚トレーニング|床での重心移動ドリルと股関節ケア
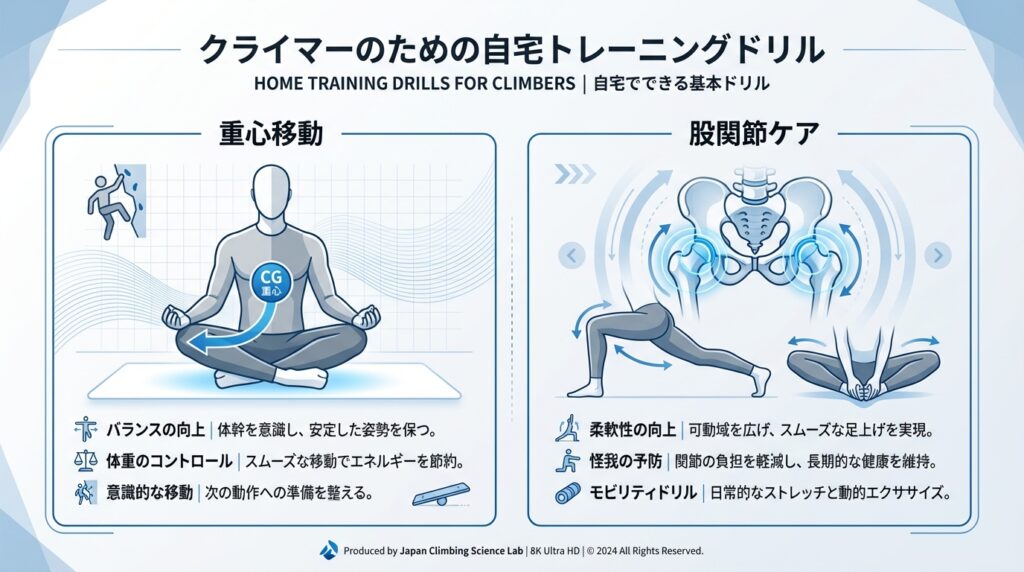
ジムに行けない日こそ、自宅の床でクライミングの「操作OS」をアップデートする絶好の機会です。壁がない環境で重心移動の感覚を養うことは、脳内イメージと実際の身体操作のズレを修正するのに極めて有効でしょう。
多くのクライマーは筋トレに励みがちですが、優先すべきは物理法則を身体に染み込ませる地味なドリルです。安全な床の上でできない動きは、恐怖心が伴う壁の上では絶対に再現できません。まずは「四つん這いダイアゴナル」から始めてみてください。
床に四つん這いになり、右手と左足を同時に浮かせて水平に伸ばします。このとき、腹筋で無理に固めるのではなく、背骨を軸にしてバランスが取れる「ゼロポイント」を探ってください。対角線の手足が伸びることで、身体が一本の軸として安定する感覚がつかめるはずです。まさにダイアゴナルの基本原理である、回旋運動とバランス保持を重力下でシミュレーションする訓練といえます。
次に重要なのが「フロッグ・ストレッチ」を応用した重心移動ワークです。床でカエルのように股関節を限界まで開き、肘をついた状態で、骨盤を前後左右にゆっくりスライドさせましょう。
単に柔軟性を高めるだけでなく、開脚した状態で重心(COM)を動かす感覚を養うのが目的です。壁に張り付いた状態で、股関節が詰まらずスムーズに腰を入れられるかどうかは、この可動域と制御能力にかかっています。特にドロップニーやヒールフックで股関節に違和感がある人は、このケアを入念に行ってください。
自宅で養ったこれらの感覚は、次回のジムワークで驚くほどスムーズな動きとして還元されます。筋力ではなく、骨格と重心で身体を操る準備を整えておきましょう。
クライミングムーブ習得におけるトラブルシューティングとFAQ
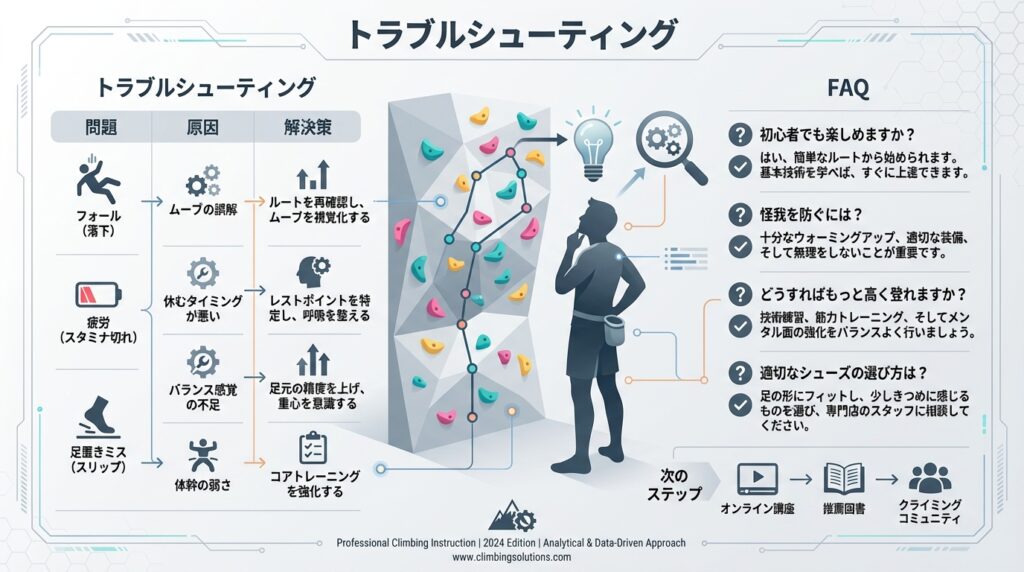
自宅でのイメージトレーニングや基礎練習を終えていざジムへ向かうと、想定外のハードウェアエラー(身体的制約や道具の不一致)に直面することがあります。ここでは、多くのクライマーが4級の壁前後で遭遇する代表的な3つの課題について、物理的かつ実践的な解決策を解説します。
- 身長・リーチの壁: 物理的に届かない距離を埋めるためのアルゴリズム修正(中継技術)
- 怪我と痛み: 指関節を守るためのホールディング・スタイルの使い分け
- シューズ選び: 壁の傾斜角度に合わせた適切なデバイス選定(ダウントゥとフラット)
これらは精神論ではなく、適切な知識とギアの選択で回避可能なトラブルです。
身長・リーチの壁|届かない時の中継ホールド活用法
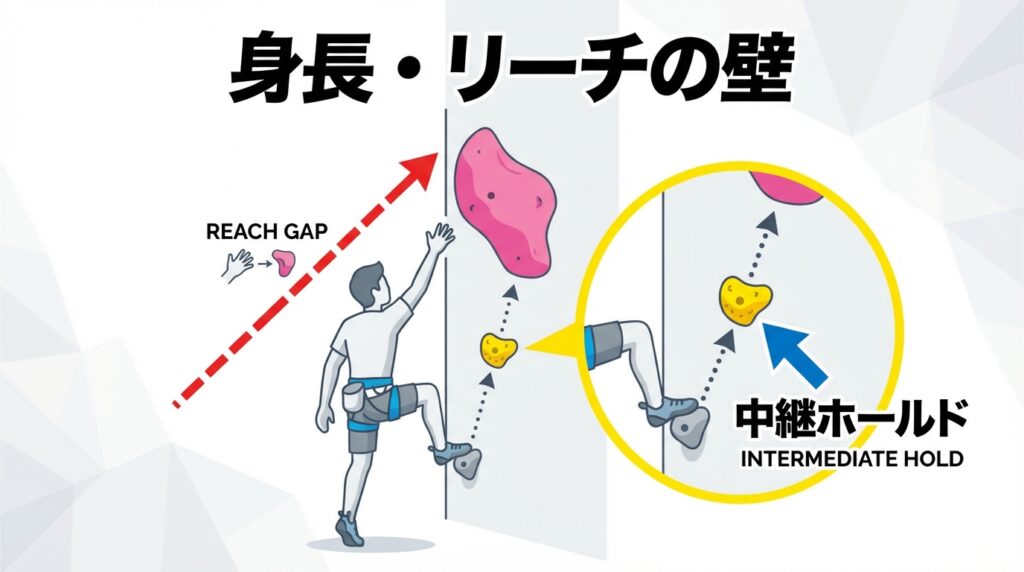
物理的なリーチ不足は、登れない決定的な理由にはなりません。届かないのであれば、壁の中に独自の「見えない階段」を作り出せばよいでしょう。
そもそも、クライミングにおける正解ルート(Beta)は一つではなく、自身の体格に合わせて最適化(ハッキング)する余地が残されているからです。
具体的には、「インターミディエイト」と呼ばれる中継技術を駆使してください。次のホールドが遠すぎる場合、指定されたホールド以外の壁の微細な凹凸(カチ)や、ボルト穴の縁を一瞬だけ保持し、中継点として利用します。また、手だけでなく足の工夫も重要であり、正規のスタンスよりも高い位置に足を置く「ハイステップ」や、何もない壁を蹴る「スメアリング」を組み合わせることで、強制的に重心を押し上げることが可能。
身長というハードウェアの制約を嘆くのではなく、環境を最大限に利用するソフトウェアの工夫でカバーしましょう。
怪我と痛み|カチ持ちとオープンハンドの使い分け判断
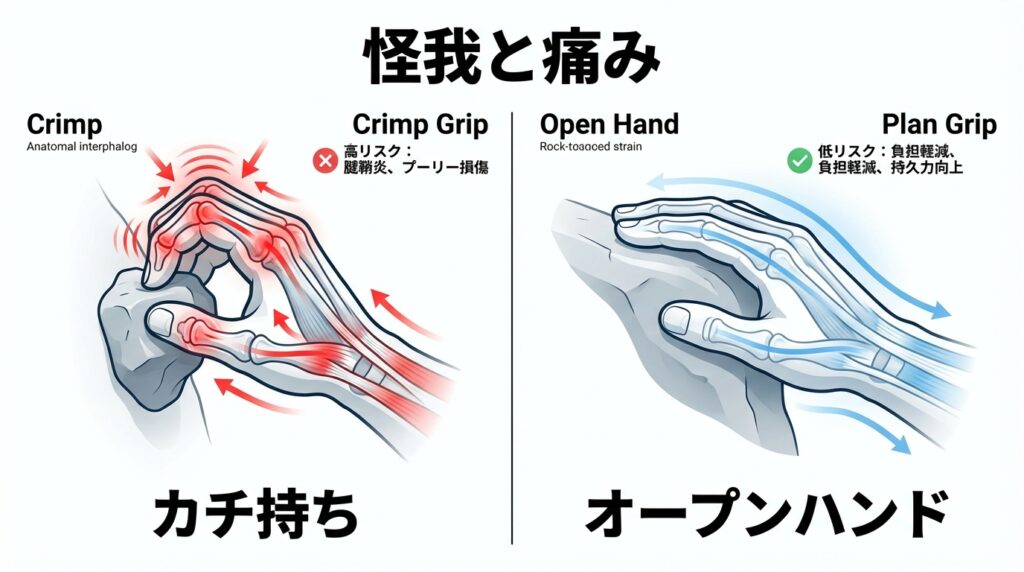
指の故障を防ぎ、長く登り続けるためには、ホールドの形状やムーブの強度に応じて「カチ持ち(クリンプ)」と「オープンハンド」を戦略的に使い分ける必要があります。なぜなら、バイオメカニクスの観点において、それぞれの握り方が指の滑車組織である「プーリー」にかける物理的負荷が大きく異なるからです。特に脱初心者の時期は、保持力の向上に伴って指への負担が急増するため、この判断ミスが長期離脱につながりかねません。
まず、それぞれの特性をエンジニアリング的に理解しましょう。カチ持ち(クリンプ)とは、第一関節を反らし、第二関節を鋭角に曲げ、さらに親指を人差し指の上に重ねてロックする握り方です。このフォームは、テコの原理により微細な突起(ホールド)に対して強力な保持力を発揮しますが、指の屈筋腱を束ねる「A2プーリー」に対して破滅的な負荷を集中させます。動的なムーブで着地した瞬間にこの握り方をしていると、腱鞘が耐えきれずに断裂する、いわゆる「パキる」事故が発生する確率が跳ね上がります。
一方、オープンハンドは、指を伸ばし気味にしてホールドへ引っ掛ける握り方です。摩擦係数を最大限に利用するフォームであり、腱への張力が分散されるため、医学的な故障リスクは大幅に低くなります。スローパー(丸みを帯びたホールド)や、ランジのような衝撃が加わる場面では、構造的にこちらが推奨されます。多くのクライマーは保持力が即座に出るカチ持ちを好みますが、トレーニングやアップの段階では、あえてオープンハンドを使用し、指の耐久性を温存するマネジメントが不可欠です。
痛みは身体からの警告信号であり、システムエラーの通知です。もし指の関節に違和感があるなら、その課題のグレードに関わらず迷わずオープンハンドへ切り替えてください。怪我のリスクを確率論的に管理し、自身の身体というハードウェアを保護することこそ、上級者へ至るための最短ルートといえるでしょう。
シューズ選びの影響|ダウントゥとフラットの使い分け

クライミングシューズの形状選びは、単なる好みではなく、物理的な機能差を理解して行うべき重要なパラメータ調整です。多くの初中級者が「上級者になればダウントゥを履くべきだ」と考えがちですが、壁の傾斜や課題特性によって最適なツールは明確に異なるでしょう。
両者は摩擦を得るためのアプローチが、力学的に真逆だからです。ダウントゥは爪先を鉤爪のように湾曲させることで、点に対して強い圧力を集中させ、ホールドを「掴む」動作を補助する役割を持ちます。対してフラットは、ソールを平らに保つことで接地面積を最大化し、面での摩擦力を確保する設計と言えます。
具体的には、130度を超える強傾斜でかき込みを行う際、ダウントゥのアーチ構造が足裏のバネとなり、小さなエッジでも身体を強力に引き寄せます。しかし、スラブ壁で凹凸のない巨大なボテ(Volume)にスメアリングをする場面では、点が接触するだけのダウントゥは不安定になりやすく、フラットシューズの方が圧倒的に有利です。
足型や目的に合わない靴での練習は、正しいフォーム習得を阻害するノイズになりかねません。自身の登る壁の傾斜角を分析し、必要な機能が実装された一足を選ぶことこそ、ムーブの精度を高めるエンジニアリングの一環と考えてください。
まとめ|クライミングムーブは暗記ではなく物理現象として理解する
ここまで解説してきた18種類のムーブは、単なる「技のカタログ」ではなく、重力という不変のルールに対抗するための物理的なソリューションです。多くのクライマーが直面する壁は、筋力の限界ではなく、身体操作の論理的エラーに起因しています。なぜその足位置なのか、なぜ重心をずらす必要があるのかという理屈さえ理解していれば、身長やリーチの不利は技術でカバーできる領域が大幅に広がるでしょう。
これからのジムワークでは、単に課題をクリアできたかどうかという「結果」だけでなく、狙った物理現象を再現できたかという「プロセス」に目を向けてください。たとえ完登できなくても、意図した重心移動ができれば、それは着実な進歩と言えます。失敗を筋力不足のせいにせず、入力パラメータを微調整するようにムーブを修正していく作業こそが、脱・初心者への最短ルートとなるはずです。
まずは自宅でイメージを作り、次回のクライミングで一つずつ身体にインストールしていきましょう。壁というパズルを、鍛え上げた筋肉ではなく、磨き上げたロジックと技術で解き明かす知的興奮をぜひ味わってください。